Présentations dévelopés
Lista de secções
-
Sketchup
Alessandra Marchetti-Luca grillo
Bonjour tout le monde!
Moi je suis Alessandra Marchetti, celle qui participe à la réparation du Robot. Je travaille en groupe avec Lidia Pons, Annalivia Zadotti et Luca Grillo, celui avec qui je travaille pour les modifications techniques du robot. Avec Luca je travaille donc pour et avec le robot. On controle à toutes les séances les minimes chose de cassé du Robot. On travaille donc avec Sketchup, pour trouver la couverture de la base du robot, pour que la pince ne touche pas et donc ne se casse pas.
Ici dessous, je vais vous faire voir le projet de la couverture pour notre robot:
-Alessandra Marchetti
Bonjour à tous je suis Luca Grillo
J' ai principalement travaillé sur la construction de la protection du robot avec Alessandra Marchetti et donc aussi sur le positionnement des nouvelles pièces construites.
Parlant de la construction de la protection, Alessandra et moi on a dut refaire plusieurs fois le plan avant d' avoir le plan final . Je trouve personnellement que le travaille qui nous a prix le plus de temps na était le positionnement de la protection, les roux ect... mais certainement la construction de la protection .
-Luca Grillo
-
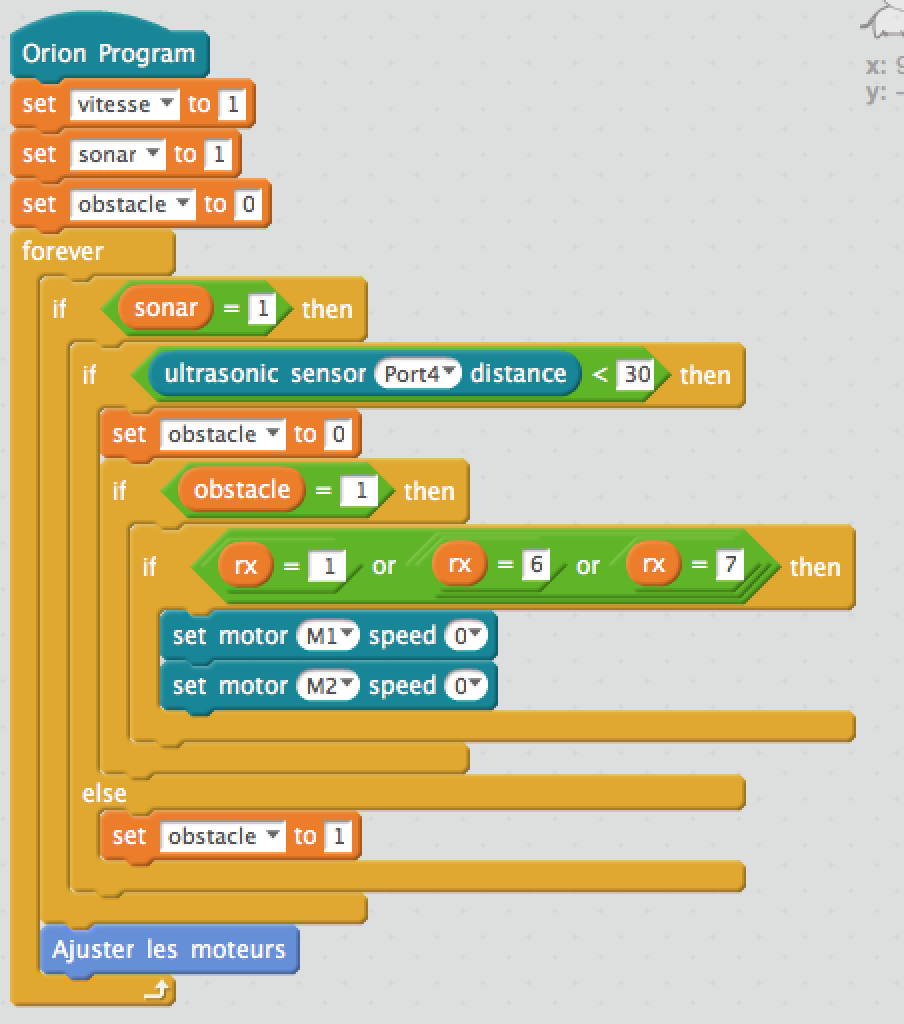
Voici une prise d'écran du programme mBlock avec le sonar