Topic 1
Lista de secções
-
-
Notre groupe est constitué de 5 membres : Marc Magliari, Margaux Courcol, Ilyès Jilali, Wandrille Boivin et Pénélope Fremaux. Notre groupe s’appelle « La Trinité ».
Marc est le responsable de groupe, il s’occupe de la production du pare-choc du robot pour que la pince ne touche et n’endommage pas un des moteurs.
Margaux et Pénélope s'occupent du robot, elles vérifient que les vis soient bien serrées comme il le faut et elles s'occupent aussi des cartes mentales.
Ilyès s’occupe de la programmation du robot et de la pince à partir du logiciel AppInventor.
Wandrille s’occupe de la programmation du robot et de la pince avec le logiciel mBlock.

Carte mentale sur la composition du groupe.
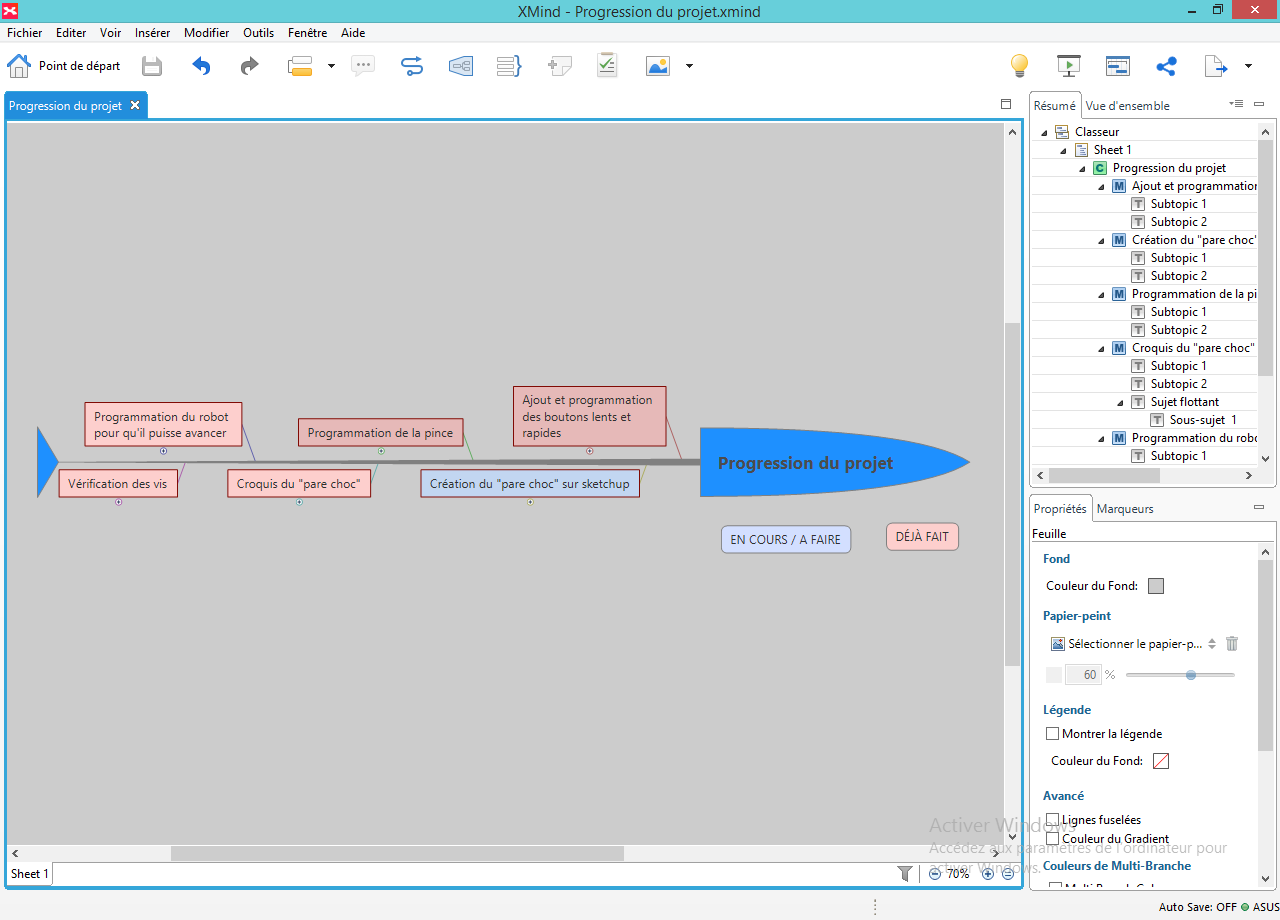
Carte mentale sur la progression du projet (au début)
-
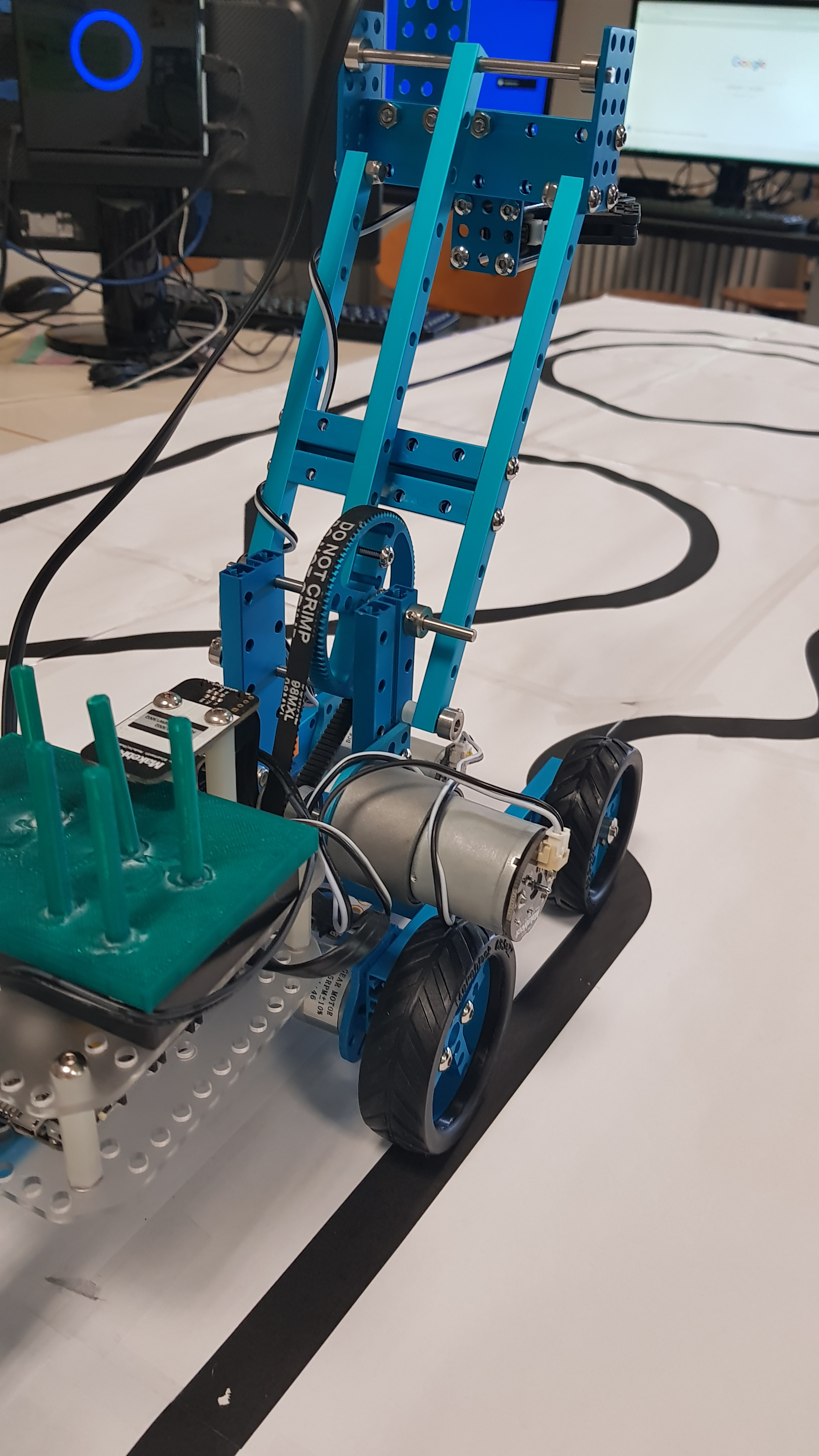
Dernièrement, nous avons installé le sonar pour éviter qu'il heurte des objets devant lui, mais il peut aussi être désactivé.
Nous avons aussi installé un capteur pour le suivi de ligne, c'est à dire que ce capteur lui permet de suivre une ligne au sol s'il est bien programmé, ce qui est le cas.
Nous avons aussi échangé les chenilles en pneus afin que le suivi de ligne soit plus fluide.
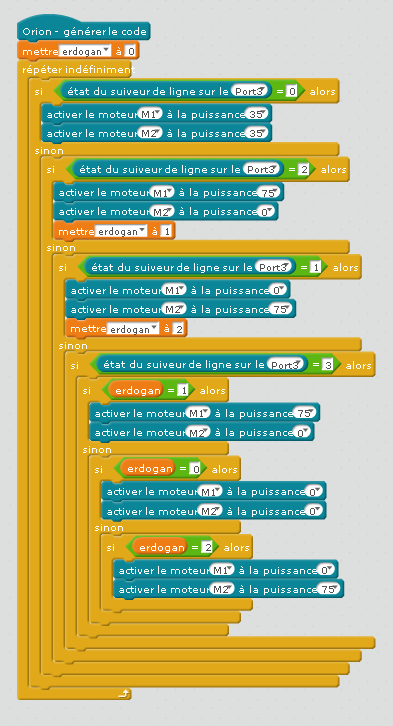
Programme Mblock de Wandrille Boivin.

Carte mentale sur la progression du projet, de Margaux Courcol et Pénélope Fremaux.
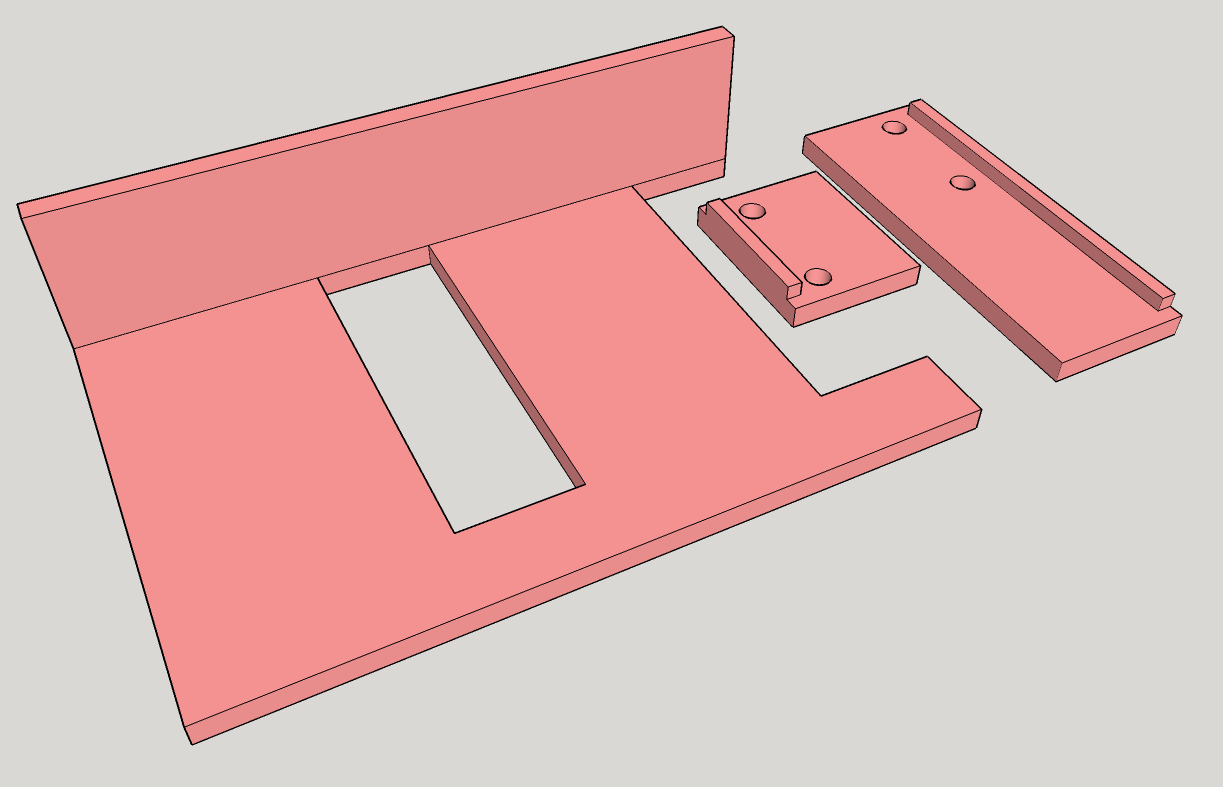
"Pare-choc" de Marc Magliari.
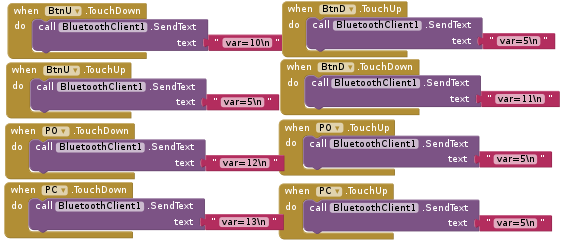
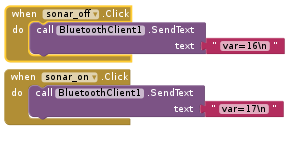
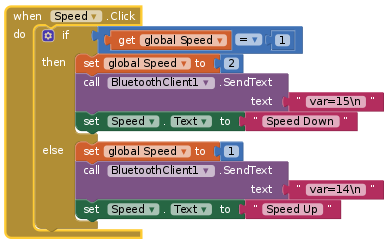
Parties les plus importantes du programme AppInventor de Ilyès Jilali.
Quelques photos de notre groupe:



-