Un programme pour commencer avec les déplacements
Requisitos de conclusão
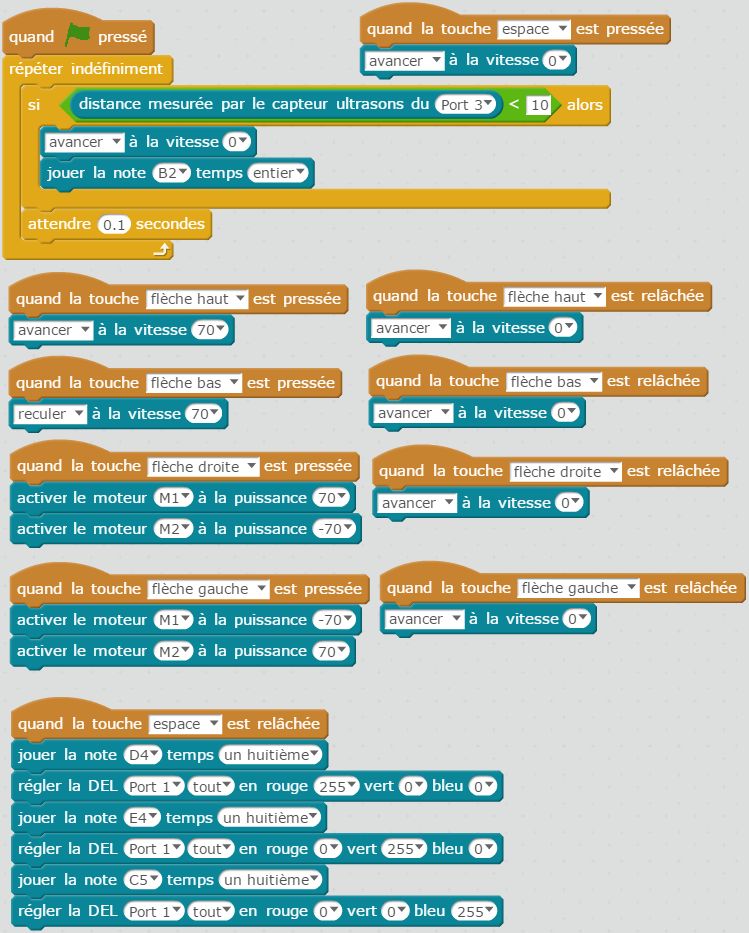
oici un programme pour déplacer le robot, et s'arrêter s'il y a un obstacle : (fichier de programme)
Última alteração: domingo, 2 de junho de 2019 às 11:18